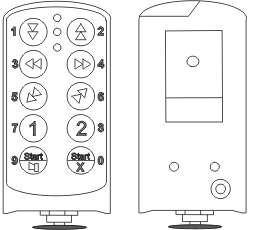
Klasična
upravljanja sredstvima unutarnjeg transporta, radnim strojevima, kao
i različitim preprekama na putevima transporta sirovine i opreme još uvijek
je bazirana na upravljačkim kutijama koje su fiksno pričvršćene na sredstvo
transporta, uz prepreku ili na radnom stroju. Takva rješenja, često puta
uzrokuju greške koje se, uglavnom, tretiraju kao ljudska pogreška, s čime
se često puta mi ne slažemo. Pri nastojanju radnika da postigne čim bolje
rezultate rada, nastoji se koncentrirati na predmet svog djelovanja, te
mogucnost direktnog djelovanja na postupke stroja (dizalice, mosne dizalice,
otvaranje prepreke i sl.) bitno olakšavaju i pomažu u realizaciji postavljenog
cilja.
|
|
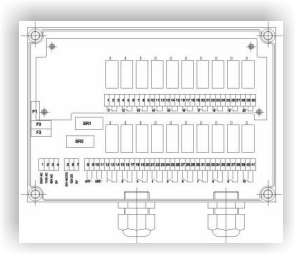
Montaža
rotora parne turbine u stator.
Masa rotora, ili poklopca statora turbine može imati masu iskazanu u tonama.Prihvat
primjerice rotora obavlja se preko naprave, kako se rotor s lopaticama nebi
oštetio. Zračnost između lopatica rotora i statora je barem za 3 do 4 reda
veličina manja od gabarita samog rotora. Iz navedenih razloga vidljivo je
da pozicioniranje i spuštanje rotora u ležajeve je izričito osjetljiv zadata,
gdje svaka greška može izazvati vrlo skupa oštećenja. Ovim sustavom je omogućeno
operateru da iz neposredne blizine promatra i upravlja dizalicom, bez komuniciranja
s dizaličarem i eventualno krivo svaćenih naredbi za upravljanje dizalicom. |